Publicado: 14 de março de 2013
Categoria: Artigos Técnicos
Para diferentes soluções e métodos de partidas de motores, a ABB disponibiliza um software de tabelas de coordenação derivadas de testes experimentais
Alguns aspectos são fundamentais na escolha e na execução de um sistema para partida e controle de motores, como a segurança e a confiabilidade na solução a ser obtida. As principais causas de falhas em motores devem-se a curto-circuitos que ocorrem, por exemplo, por umidade, poeira, óleo nos enrolamentos ou sobrecargas. As sobrecorrentes resultantes de falhas causam aumento da temperatura que podem danificar o motor de forma irreversível ou até mesmo causar incêndios.
Consequentemente, a partida corresponde a uma fase crítica para o motor e para a instalação que o alimenta. Por isso, sua operação deve ser corretamente monitorada e protegida contra erros e falhas. Com este propósito, é preciso definir e dimensionar corretamente os dispositivos de partida e chaveamento do motor.
O primeiro passo a ser dado neste quesito é identificar a norma de referência, que é a IEC 60947-4-1 “Contatores e disjuntores-motor eletromecânicos” e que engloba os contatores em corrente alternada e contínua, bem como os disjuntores-motor em corrente alternada, que deverão trabalhar em tensões não superiores a 1000Vca ou 1500Vcc.
Principais Definições da Norma
Os tipos de dispositivo geralmente mais utilizados para a partida e proteção de motores são:
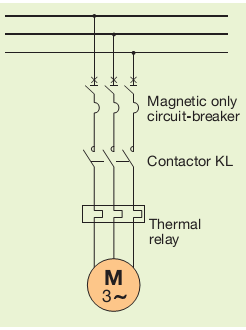
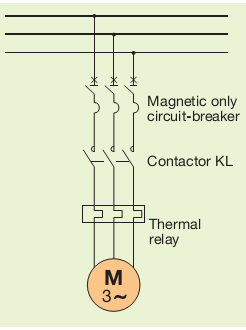
· Dispositivo de proteção contra curto-circuitos, por exemplo, disjuntor somente magnético ou fusível;
· Dispositivo de interrupção, como o contator;
· Dispositivo de proteção contra sobrecargas, como o relé térmico;
Estes dispositivos devem ser propriamente dimensionados para a correta operação e proteção do motor, mas também coordenados entre si para garantir segurança à instalação. Um exemplo deste caso é a definição do dispositivo de proteção contra curto-circuito em conformidade com o nível de curto-circuito da planta.
A verificação da proteção entre dispositivos é executada pelo fabricante através de dados experimentais e de características do produto que, normalmente, não são reportadas em catálogos técnicos ou comerciais. Sendo assim, o fabricante deve disponibilizar tabelas de coordenação informando os componentes a serem utilizados para se obter as características exigidas. O uso de componentes de partida ou proteção contra curto-circuito que não sejam os recomendados pelo fabricante pode tornar a coordenação não adequada.
A coordenação em uma partida de motor (disjuntor + contator + relé térmico), além de estar referenciada pela corrente nominal do motor, tensão de operação e nível de curto-circuito, é também classificada como “normal” e “pesada” e como “tipo 1” e “tipo 2”. Sobre a primeira classificação, pode-se afirmar que a distinção entre partida “normal” e “pesada” está relacionada ao tempo de partida e a curva de atuação da proteção térmica, enquanto as coordenações “tipo 1” e “tipo 2” são diferenciadas de acordo com o uso dos dispositivos de interrupção (contator) em condições de curto-circuito e dos dispositivos de proteção contra sobrecarga (relé térmico). Abaixo seguem detalhes sobre como diferenciar cada tipo:
Partida Normal e Pesada
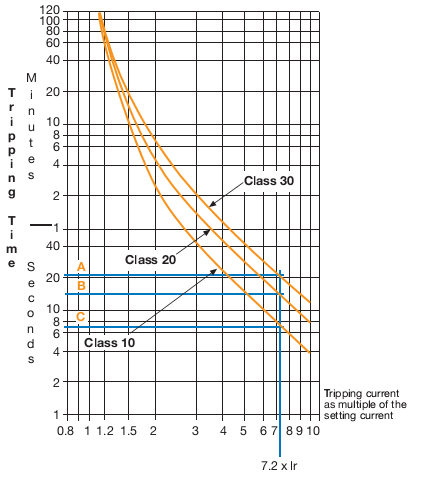
A classificação sobre o tipo de partida está relacionada às características requeridas pela carga e pelo comportamento do relé térmico. Geralmente, são utilizados os relés térmicos “compensados”, cujo comportamento não se altera conforma a variação de temperatura. Considerando relés compensados, a Norma define algumas classificações para suas curvas de atuação considerando os tempos de atuação para 7,2 x Ir, aonde Ir é a corrente ajustada para a proteção térmica. Estas classificações são as “classes de disparo”, como mostra a tabela abaixo:
|
Classe de Disparo |
Tempo de Atuação Ti [s] para 7,2 x Ir |
Tempo de Atuação Ti [s] para 7,2 x Ir (banda E) |
|
2 |
- |
Ti ≤ 2 |
|
3 |
- |
2 < Ti ≤ 3 |
|
5 |
0,5 ≤ Ti ≤ 5 |
3 < Ti ≤ 5 |
|
10A |
2 < Ti ≤ 10 |
- |
|
10 |
4 < Ti ≤ 10 |
5 < Ti ≤ 10 |
|
20 |
6 < Ti ≤ 20 |
10 < Ti ≤ 20 |
|
30 |
0,5 < Ti ≤ 30 |
20 < Ti ≤ 30 |
|
40 |
- |
30 < Ti ≤ 40 |
As classes de disparo mais consideradas e utilizadas em dispositivos são 10A, 10, 20 e 30. É muito comum se falar em partida normal e associá-la às classes de disparo 10A e 10, ou em partida pesada com as classes 20 e 30. As outras classes de disparo e as classes com tempo de disparo indicados com “banda E” foram introduzidas posteriormente à Norma IEC 60947-4-1 e são caracterizadas por uma faixa de tempo mais restrita, tendo em vista o aumento do tempo mínimo da tabela.
Os limites do tempo Ti definidos na tabela são tempos de atuação da proteção térmica e tem os seguintes significados:
· O limite inferior representa o menor tempo em que o relé não deve atuar de forma a não interferir na partida do motor;
· O limite superior é o tempo em que o relé certamente atuará. Este limite é definido com referência nas características padrão em que os componentes do motor irão resistir à corrente de partida e os efeitos térmicos que podem ser gerados pela corrente;
Um exemplo de utilização das informações da tabela pode tornar este conceito mais claro. Assumindo que um motor possui uma aplicação específica com tempo de partida em 5 segundos, a escolha das classes 10A e 10 não será correta, pois teoricamente poderiam atuar em 2 e 4 segundos, respectivamente. Portanto, será necessário utilizar a classe 20, que não provocará a atuação do relé até 6 segundos e permitirá a partida completa do motor.
A figura abaixo mostra um exemplo típico da curva de atuação de um relé térmico na partida de motores. Sua análise mostra a divisão entre as diversas classes 10A, 10, 20 e 30 e os diferentes valores que Ti assume em casa uma delas. Vale ressaltar que o valor mostrado corresponde ao tempo de atuação para uma corrente de 7,2 vezes o valor ajustado no relé térmico, que é o valor de referência estabelecido por Norma.
As características da carga acoplada ao motor, o tipo do motor e o método de partida são elementos que influenciam no tempo de partida e, consequentemente, na escolha do dispositivo de proteção térmica. A fim de tornar o conceito de classe de disparo mais próximo das aplicações do dia-a-dia, existem algumas aplicações que são na maioria das vezes cargas normais, como é o caso das bombas centrífugas (portanto, classe 10A ou 10). Consequentemente, cargas como misturador, moinho e ventilador centrífugo são consideradas cargas tipicamente pesadas, classe 30.
Coordenação Tipo 1 e Tipo 2
Os únicos tipos de coordenação de partidas com referência no dispositivo de proteção contra curto-circuito admitidos pela norma IEC 60947-4-1 são “tipo 1” e “tipo 2”.
· Coordenação Tipo 1: Sob condições de curto-circuito, é admissível que o contator e o relé térmico sejam danificados. Consequentemente, não estarão aptos a operar novamente sem reparo ou substituição de peças. No entanto, a Norma define que estes dispositivos não podem causas danos às pessoas ou à instalação com, por exemplo, lançamento de peças ou estilhaços para fora do painel.
· Coordenação Tipo 2: Sob condições de curto-circuito, é admissível o risco de soldagem nos contatos do contator, desde que possam ser separados facilmente (por exemplo, com uma chave de fenda) e não apresentem deformações significativas. Este tipo de coordenação também exige que o contator ou o disjuntor-motor não causem danos às pessoas ou à instalação e que sejam aptos a operar novamente logo após a eliminação da condição de curto-circuito, visando a continuidade do serviço.
A partir da definição dos tipos de coordenação de partidas é possível deduzir como o “tipo 1” permite a utilização de dispositivos de menor custo e dimensões, mas com a desvantagem de custos e tempo de parada maiores para manutenção e substituição dos componentes. Por outro lado, a coordenação “tipo 2” implica em um investimento inicial menor, mas que pode ser amortizado pelo menor tempo de parada e menor custo de manutenção.
Métodos de Partida
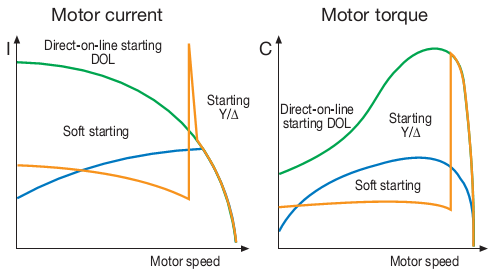
Independentemente das classificações citadas acima, a partida de motores trifásicos assíncronos em aplicações que não necessitam de variação de velocidade pode ser obtida através de diversas modalidades de aplicação de tensão nos enrolamentos do estator e também de acordo com outros parâmetros elétricos e mecânicos. Estas variáveis podem gerar mais ou menos stress no motor, mas também é possível entregar diferentes valores de torque na carga. A seguir serão identificados brevemente alguns métodos de partida de motores existentes na atualidade:
· Partida Direta (DOL): provavelmente o método mais tradicional de partida de motores e consiste em conectar o motor diretamente à rede de alimentação, executando a partida com 100% da tensão nominal e alto nível de torque. Sua aplicação é comumente encontrada em motores de potências pequenas com partida em plena carga. Estas vantagens estão diretamente ligadas a alguns problemas, por exemplo, alta corrente de partida (6 a 8 vezes a corrente nominal do motor), que gera stress em cabos, enrolamentos, transmissões, etc. Este método de partida é relativamente simples e de baixo custo, podendo ser composto por: disjuntor-motor/caixa moldada com proteção somente magnética/chave seccionadora com base fusível + contator + relé térmico, disjuntor-motor termomagnético + contator, entre outras configurações.
A seguir serão apresentados alguns métodos de partida conhecidos como partidas com tensão reduzida, que implicam na redução da corrente de partida, mas também reduzem o torque inicial.
· Partida Estrela/Triângulo: método de partida que consegue a redução da corrente de partida através de duas etapas de fechamento do motor. Na primeira etapa o motor é conectado em estrela, onde a corrente de partida é reduzida para um terço do que seria em uma partida direta e, na segunda etapa, o motor é ligado na configuração triângulo (ou delta), quando retorna às suas características nominais. Com a redução da corrente o torque é reduzido na mesma proporção, por isso é um método recomendado para partidas de motores sem carga ou com cargas de baixo torque inicial.
· Partida com Autotransformador: também conhecida como partida compensadora, é um método em que se utiliza um autotransformador com alguns taps, por exemplo, 50%, 65% e 80% da tensão do nominal da rede. Inicialmente o motor é alimentado pelo tap de menor nível de tensão e, ao passar do tempo, esta alimentação é feita pelos demais taps até que finalmente a alimentação é feita diretamente pela rede. É uma opção para motores de potência maior, cuja carga tem inércia elevada, mas tem um custo relativamente alto e necessita de um espaço significativo, por conta do autotransformador.
· Partida Suave: método de partida em que se utiliza um dispositivo denominado “softstarter”, que permite a limitação da corrente de partida, determinação do torque e ajuste do tempo de partida (e parada), tornando possível a alimentação do motor com um nível inicial de tensão muito baixo que vai se elevando ao longo do processo, evitando os desgastes mecânicos e elétricos comuns nas partidas direta e estrela/triângulo.
As curvas abaixo ilustram o comportamento da corrente e do torque do motor no processo de partida para diferentes métodos:
Software ABB para coordenação de partidas de motores
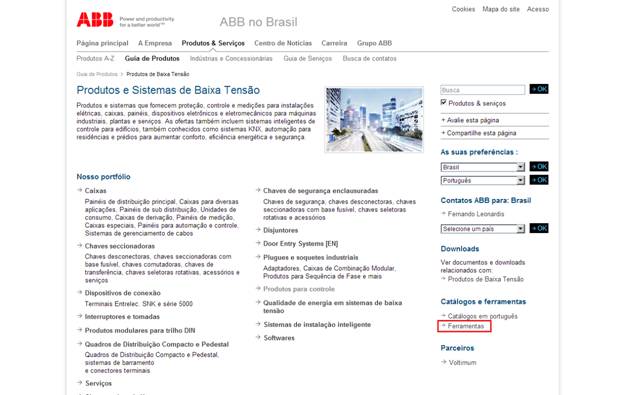
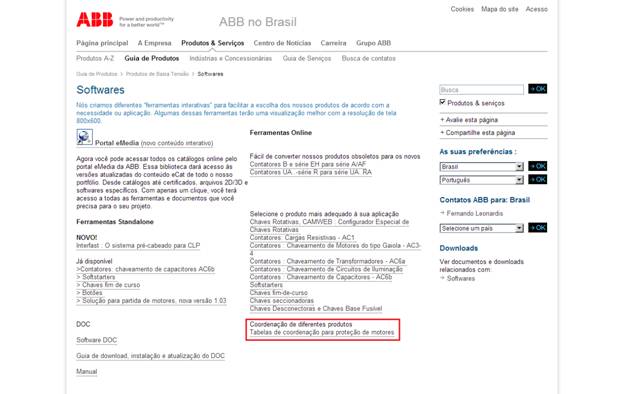
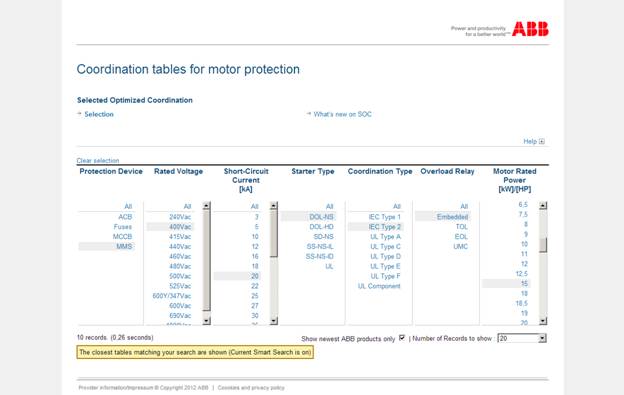
Para diferentes soluções e métodos de partidas, a ABB disponibiliza um software de tabelas de coordenação derivadas de testes experimentais. Este material auxilia o profissional na escolha dos dispositivos possíveis na composição de um resultado coordenado, protegido e adequado para a segurança e operação do motor e da instalação. Para obter acesso às tabelas de coordenação ABB, basta acessar a página da divisão de baixa tensão (http://www.abb.com.br/baixatensao), clicar na opção “Ferramentas” e, logo após, na opção “Tabelas de coordenação para proteção de motores”, como mostram as figuras abaixo:
Feito isto, na próxima tela será necessário informar os dados da partida para que a ferramenta defina as tabelas apropriadas para a aplicação em questão. É importante lembrar que não é necessário inserir os dados de todas as colunas, mas quanto mais informação constar, mais refinado será o resultado apresentado. A partir da figura abaixo serão detalhadas cada uma das opções disponíveis para o usuário:
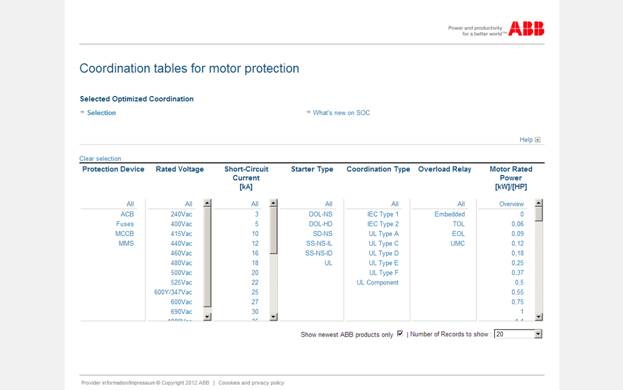
1. Protection Device (Dispositivo de Proteção): quais serão os tipos de dispositivos de proteção admitidos na partida a ser dimensionada.
a. ACB: disjuntor em caixa aberta;
b. Fuses: fusíveis;
c. MCCB: disjuntor em caixa moldada;
d. MMS: disjuntor-motor.
2. Rated Votage (Tensão de Operação): qual será a tensão de trabalho, ou seja, a tensão que alimentará o motor quando estiver em regime permanente. Caso o valor de tensão requerido não esteja listado na tabela, o usuário deverá escolher o valor mais próximo acima. Por exemplo, caso a tensão de trabalho seja 380Vca o usuário deverá escolher a opção 400Vac.
3. Short-Circuit Current (Corrente de Curto-Circuito): qual é o nível de curto-circuito no ponto de instalação daquela partida de motor.
4. Starter Type (Tipo de Partida): abaixo serão descritos somente os tipos de partida conforme o padrão IEC, que é utilizado no Brasil. Existem outros tipos de partida (UL), que são padrão de utilização em outros países como, por exemplo, os EUA.
a. DOL-NS: partida direta normal;
b. DOL-HD: partida direta pesada;
c. SD-NS: partida estrela/triângulo normal;
d. SS-NS-IL: partida com softstarter com ligação em linha, partida normal;
e. SS-ND-ID: partida com softstarter com ligação dentro do delta, partida normal;
f. UL: partida conforme padrão UL.
5. Coordination Type (Tipo de Coordenação): abaixo serão descritos somente os tipos de partida conforme o padrão IEC, que é utilizado no Brasil. Existem outros tipos de partida (UL), que são padrão de utilização em outros países como, por exemplo, os EUA.
a. IEC Type 1: coordenação tipo 1;
b. IEC Type 2: coordenação tipo 2.
6. Overload Relay (Relé Térmico):
a. Embedded: incorporado em outro dispositivo, por exemplo, o disjuntor-motor com proteção termomagnética;
b. TOL: relé térmico convencional;
c. EOL: relé térmico eletrônico;
d. UMC: relé inteligente.
7. Motor Rated Power: potência, em kW, do motor a ser acionado.
No momento da escolha de cada uma das opções, o usuário deve clicar com o mouse sobre o item desejado para que este seja destacado e considerado na busca da tabela adequada.
Para melhor exemplificar o uso desta ferramenta, suponha que determinada aplicação tenha as seguintes características:
· Proteção por disjuntor-motor termomagnético;
· Alimentação em 380Vca;
· Nível de curto-circuito no ponto de instalação de 20kA;
· Partida direta e normal;
· Coordenação Tipo 2;
· Potência de 20CV, ou seja, 15kW.
Transpondo estas informações na ferramenta ABB, as opções selecionadas pelo usuário estarão conforme abaixo:
Note que são apresentados diversos resultados divididos conforme as características, que neste caso diferem pelo nível de curto-circuito das composições (35kA e 50kA), conforme mostra a figura abaixo:
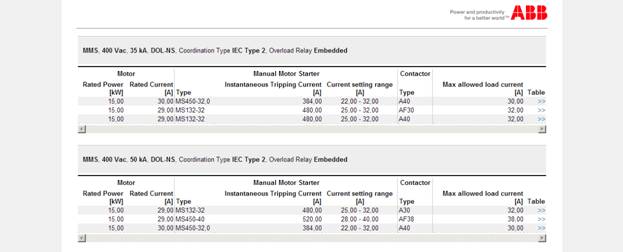
As tabelas de coordenação acima trazem as seguintes informações:
1. Motor:
a. Rated Power: potência;
b. Rated Current: corrente.
2. Manual Motor Starter (disjuntor-motor):
a. Type: modelo de disjuntor-motor ABB;
b. Instantaneous Tripping Current: corrente instantânea de atuação. A partir deste valor de corrente, o modelo de disjuntor-motor em questão atuará instantaneamente através de sua proteção magnética;
c. Current Setting Range: faixa de ajuste de corrente, para que a corrente do dispositivo possa ser ajustada para o mais próximo possível da corrente do motor.
3. Contactor (contator) – Type (tipo): modelo de contator ABB.
4. Max allowed load current (máxima corrente de carga permitida): referência de corrente a ser utilizada para o dimensionamento dos condutores que conectarão os dispositivos que compõem a partida ao motor.
É muito comum utilizar este tipo de ferramenta para o dimensionamento de partidas de motores, com potências variadas. Para estes casos, é possível que seja apresentado ao usuário uma lista com todas as potências para partidas disponíveis com os dispositivos selecionados inicialmente. Para isto, é necessário selecionar a opção “>>” presente no final de cada linha dos resultados. Tomando como exemplo a segunda linha dos resultados mostrados acima (MS132-32 / AF30), veja o resultado abaixo:
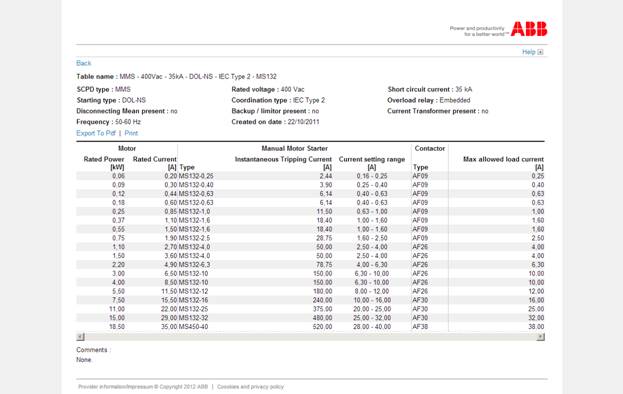
Para o exemplo dado inicialmente, com motor de 15kW, fica clara a indicação do disjuntor-motor MS132-32 juntamente com o contator AF30 para garantirmos a coordenação tipo 2 e, consequentemente, segurança e confiabilidade na partida.
Se para a mesma aplicação fosse necessário utilizar fusíveis ao invés de disjuntores-motores, seria preciso marcar a opção “Fuses” na coluna “Protection Devices” e um dos resultados seria o seguinte:
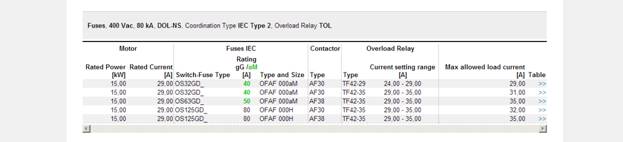
Note que, neste caso, com a utilização de fusíveis a proteção contra curto-circuito é garantida até 80kA em 400Vca. Além disso, na tabela são recomendados:
· Chaves seccionadoras com base fusível ABB da linha OS para inserção dos fusíveis tipo gG e aM, da linha OFAF;
· Contatores ABB da linha AF;
· Relés térmicos ABB da linha TF.
Estas tabelas podem ser salvas no formato PDF ou impressas.
Enfim, este tipo de documentação deve informar as composições para partidas coordenadas em conformidade com a IEC 60947 e cada fabricante deve disponibilizá-lo a seus clientes.
Sobre a ABB
A ABB é líder em tecnologias de energia e automação, proporcionando aos clientes industriais e de concessionárias a melhoria da sua performance energética, além da redução dos impactos ambientais. O grupo ABB opera em cerca de 100 países e emprega em torno de 145.000 funcionários.